microbit电子宠物狗二(小车的运动)
本期是电子宠物狗(下文简称小车)系列的第二篇

本期主要完成小车的前进后退转弯等功能
首先我们需要将4个电机连接在robotbit扩展板上的电机驱动引脚M1A、M1B、M2A、M2B正负极顺序先不管,等后面写代码时再调整。
本期主要思路是自定义函数来封装一些代码块,避免代码重复代码同时,方便我们后续调用
对于小学生需要掌握以下知识
有scratch或其他图形化编程或编程基础
需要掌握自定义函数(别名:自制积木、自定义方法、我的模块),需要会使用含参数的自定义函数。
数学中的正数与负数
数学中的绝对值
打开网站,https://makecode.microbit.org,新建一个项目,连接microbit开发板
在项目中添加扩展、找到或搜索robotbit扩展
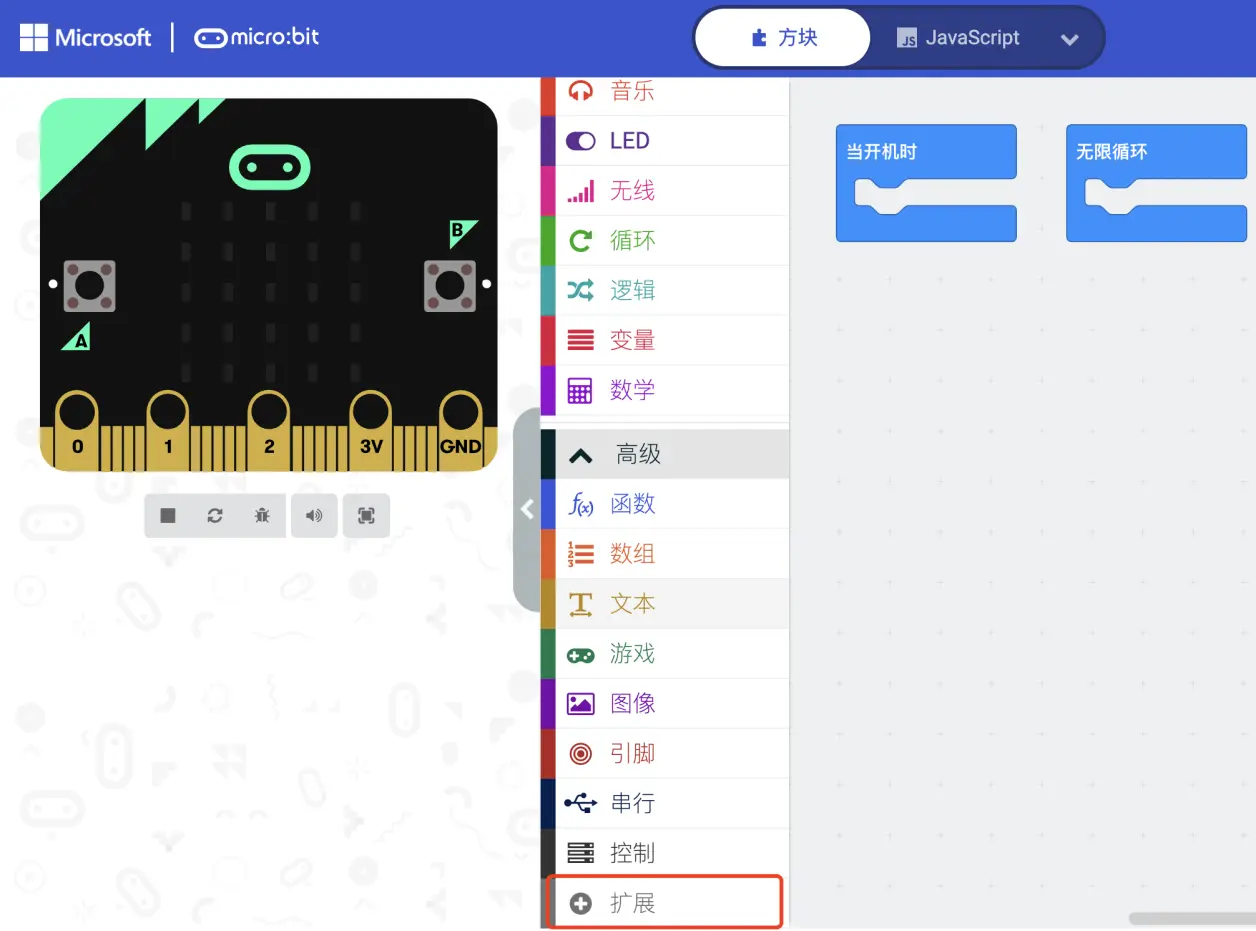 添加扩展
添加扩展  robotbit扩展模块
robotbit扩展模块准备就绪、思考一下对于小车什么功能最重要
是移动,无论是前进后退,旋转都离不开移动,小车不同的运动方向只是让不同电机使其旋转速度或方向不一样便可实现以上功能。
接下来的一步很关键,我们将创建一个通用的方法函数,在这个基础上便可实现前进后退旋转
在此之前你需要知道四个轮子以相同方向相同速度旋转便是前进或后退,如果一侧轮子慢或旋转方向相反则为转弯
于是我们的自定义函数方法设计成这样
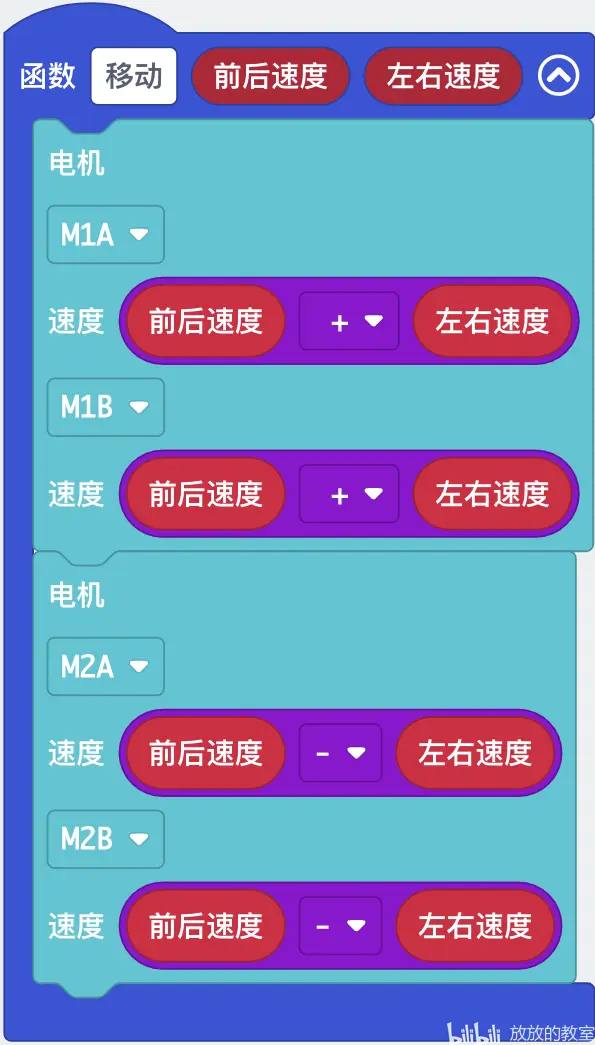 移动方法
移动方法左右为0时,前后速度大于0则前进,负数则后退,这时候我们可以在开机时调用此函数进行测试
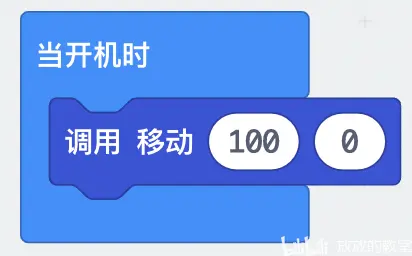 测试
测试这时候观察哪个电机旋转方向不对,改变他的正负极,当然也可以在代码里面进行修改。
有了这个通用的方法后,便可在此基础上完成一系列方法,方便后续使用
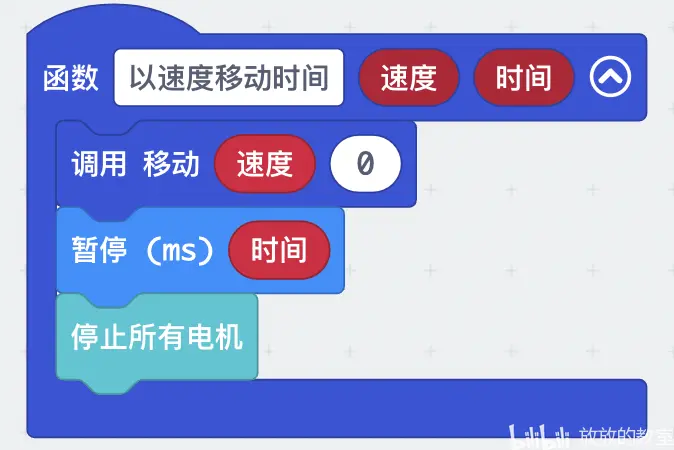 移动固定时间
移动固定时间 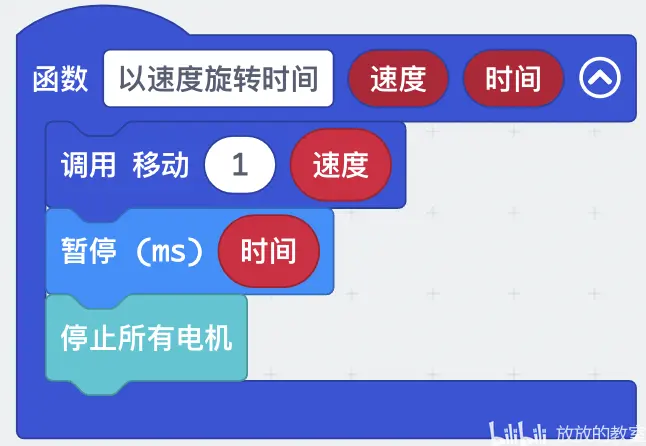 旋转固定时间
旋转固定时间通过调整旋转时间和速度可以实现左转90度右转90度等自定义方法,由于轮子大小,电机转速,摩擦系数等问题在这里放一个作为参考
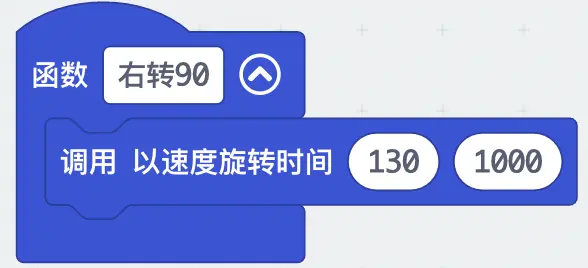 右转90度
右转90度这里90度并非标准90度,可以借助陀螺仪控制的更加精确
相关知识
microbit电子宠物狗五(无线遥控创建规则)
stm32智能小车前进,后退,左转,右转,停止
基于视觉的智能电子宠物
酷得电子方案:智能早教电子宠物狗
51单片机项目设计:WiFi视频小车制作教程、正点原子wifi摄像头模块应用、手机wifi控制
你的电子宠物狗投稿视频
基于电子宠物运动应用
一种运动陪伴型电子宠物系统
狗瘫痪后,主人用这些护理知识和自制小车撑起的是它活下去的尊严
超酷电子宠物狗来啦
原文链接: microbit电子宠物狗二(小车的运动) https://www.mcbbbk.com/newsview448179.html
| 上一篇: IDEA、Pycharm的前进、... | 下一篇: IntelliJ IDEA设置前... |
推荐分享





- 1养玉米蛇的危害 30718
- 2狗交配为什么会锁住?从狗狗生... 8000
- 3我的狗老公李淑敏33——如何... 6972
- 4中国境内禁养的十大鸟种,你知... 5646
- 5petpet generat... 5285
- 6豆柴犬为什么不建议养?可爱的... 4943
- 7自制狗狗辅食:棉花面纱犬的美... 4919
- 8南京宠物粮食薄荷饼宠物食品包... 4915
- 9家养水獭多少钱一只正常 4879
- 10广州哪里卖宠物猫狗的选择性多... 4776

